Research
My work bridges rigorous control theory with modern deep learning to build autonomous multi-robot systems that are safe, scalable, and deployable.
Stable Learning-Based Control for Multi-Agent Systems
Reinterpreting Graph Neural Networks as distributed dynamical systems and deriving stability guarantees through nonlinear control theory.
Challenge
Standard neural models function as black boxes lacking the theoretical guarantees necessary for safe deployment on physical robotic systems.
Approach
- Input-to-State Stability (ISS): Applied to the recurrent structure of Gated GNNs, ensuring bounded and stable behaviour despite real-world disturbances.
- Liquid-Graph Time-Constant (LGTC) Networks: A continuous-time Neural ODE formulation leveraging contraction analysis for structural stability.
- Dynamic Average Estimation: A distributed autoregressor with regularized stability constraints and encoding-decoding to reduce communication overhead.
End-to-End Distributed Control & Estimation
Structured learning with GNNs for distributed perception, planning, and tracking across aerial swarms and micro-robotics.
Challenge
Traditional robotic architectures rely on rigid decomposition that introduces latency and compounding errors across multi-agent interactions.
Approach
- Decentralized Multi-UAV Control: A dual-branch neural architecture for swarms that processes raw point clouds and learns neural collision constraints.
- Hybrid Micro-Robot Tracking: A temporal graph system fusing visual data with historical control inputs for sub-millimeter accuracy under occlusion.
- Graph-Enhanced Electrical Impedance Localization: Reinterpreting sensor electrodes as graph nodes to predict object locations directly from voltage measurements.
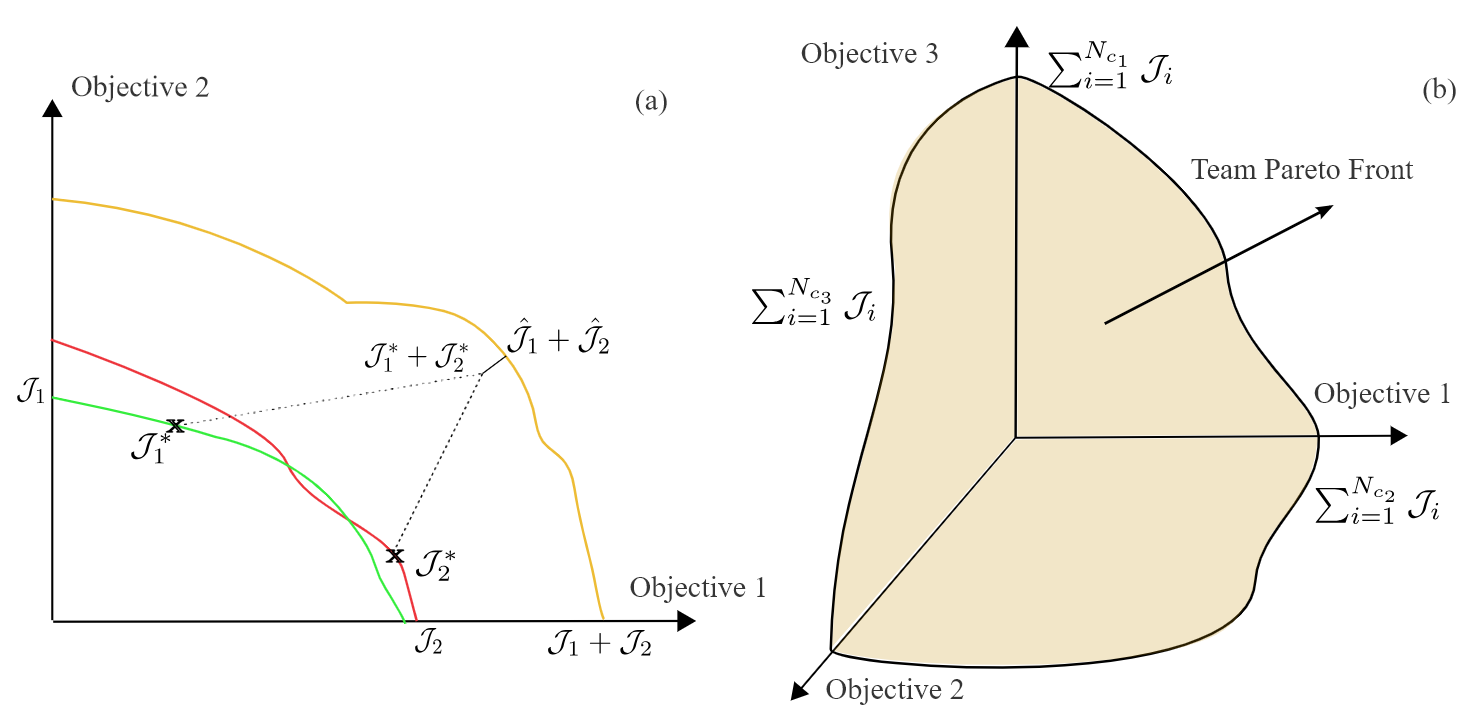
Dynamic Cluster Agreement in Multi-Robot RL
A MARL framework using distributed dynamic clustering for fluid role allocation and multi-objective optimization across robot teams.
Challenge
Multi-robot systems struggle with dynamic decision-making and fluid role allocation under uncertainty, particularly during spatial reorganization and resource depletion.
Approach
- Dynamic Heterogeneous Resource Assignment: Leverages structural similarities in return functions to dynamically cluster control policies.
- Team-Based Multi-Objective Optimization: Agents form strategic coalitions with clustered scalarization functions to align heterogeneous priorities.
- Topology-Agnostic Consensus: Validated on physical quadrotor swarms, ensuring stable clustering regardless of communication graph complexity.